
Jason Ku
- AI Researcher (3D Perception)
- MASc., University of Toronto
- Email: kujason.ku AT mail.utoronto.ca
- GitHub / Google Scholar / LinkedIn
About
- As an AI reseacher, my main interests are in Robotics, Computer Vision, and 3D Perception. I recently completed an MASc. at the University of Toronto, researching 3D scene perception for autonomous driving.
- 2017-2019: MASc. Perception Researcher with Professor Steven L. Waslander
- 2010-2015: Bachelor's Degree in Mechatronics Engineering at the University of Waterloo
- Experienced with Python, C++, Tensorflow, PyTorch, ROS, Git, DVC.
News
- 2020: MASc completed, papers accepted into ICRA, IROS, and CRV 2020.
- Jul. 2019: "Improving 3D Object Detection for Pedestrians with Virtual Multi-View Synthesis Orientation Estimation" was accepted into IROS 2019.
- Mar. 2019: Our paper, "Monocular 3D Object Detection Leveraging Accurate Proposals and Shape Reconstruction", was accepted into CVPR 2019. This work was done with Alex Pon and Professor Steven Waslander.
- Oct. 2018: Presented the paper, "Joint 3D Proposal Generation and Object Detection from View Aggregation", at IROS 2018. This work was done with Melissa Mozifian, Jungwook Lee, Ali Harakeh, and Professor Steven Waslander.
- Sep. 2018: Transferred to the University of Toronto, Institute for Aerospace Studies.
Publications
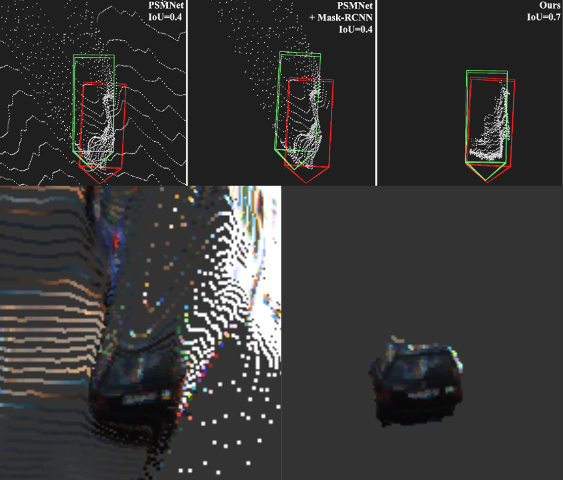
Object-Centric Stereo Matching for 3D Object Detection
- Alex D. Pon, Jason Ku, Chengyao Li, Steven L. Waslander
- ICRA 2020: 2020 IEEE International Conference on Robotics and Automation
- Stereo 3D object detection
- Demo Video
- arXiv

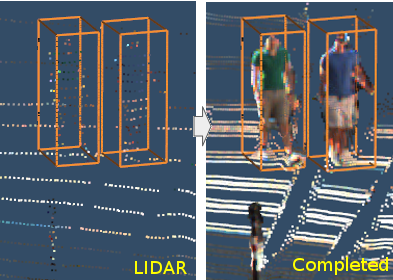
Improving 3D Object Detection for Pedestrians with Virtual Multi-View Synthesis Orientation Estimation
- Jason Ku, Alex D. Pon, Sean Walsh, Steven L. Waslander
- IROS 2019: 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems
- Realistic multi-view synthesis of virtual views of pedestrians to improve heading estimation.
- 1st place KITTI Pedestrian Orientation Estimation Benchmark
- arXiv
- Demo Video

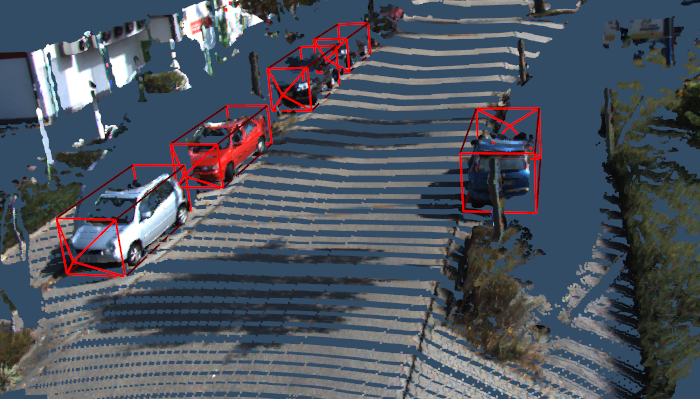
Monocular 3D Object Detection Leveraging Accurate Proposals and Shape Reconstruction
- Jason Ku*, Alex D. Pon*, Steven L. Waslander (*equal contribution)
- CVPR 2019: 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition.
- Monocular 3D detection network that leverages proposal regression, and is designed to optimize consistency between 2D observations and 3D point cloud estimates instead of 3D bounding box estimates
- Demo Video
- arXiv / Paper
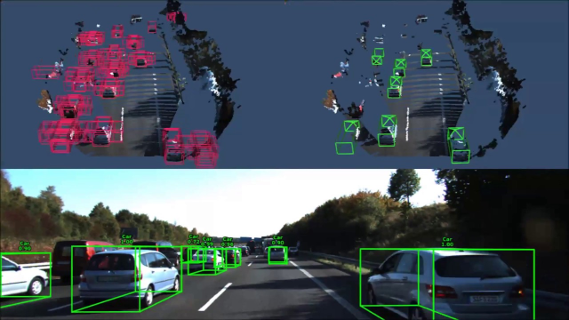
Joint 3D Proposal Generation and Object Detection from View Aggregation
- Jason Ku, Melissa Mozifian, Jungwook Lee, Ali Harakeh, Steven L. Waslander
- IROS 2018: 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems.
- Open Source, Real-Time 3D Object Detection for Autonomous Driving
- Integrated into the autonomoose perception stack and used to drive 100km autonomously
- Code / arXiv / Paper
- Demo Video
- KITTI Benchmarks: 3D / BEV
In Defense of Classical Image Processing: Fast Depth Completion on the CPU
- Jason Ku, Ali Harakeh, Steven L. Waslander
- CRV 2018: (Oral) 15th Conference on Computer and Robot Vision
- A Fast, Structure-Preserving Depth Completion Algorithm using Classical Methods
- Code / arXiv / Paper
- Demo Video / Extra Scenes
- KITTI Benchmark: Depth Completion
- Notes
Other Projects
3D Scene Visualizer
- Open source visualization tools for Python using VTK with support for KITTI, nuScenes, and Argoverse
- GitHub
Other Experience

Research and Development
- Northern Digital Inc. (NDI) Co-op
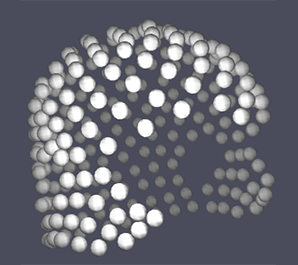
- Design of a Handheld EEG Electrode Position Scanner (Krios)
- Demo Video
- 3D EEG node position scanning using a handheld tracking camera
- The 3D position of up to 255 EEG nodes can be quickly and accurately scanned
- SLAM system: camera is localized using visible markers (yellow), new possible markers are processed (red)
- Improved robustness of tracking and formulated effective method to remove "phantom" markers
- The filtered set of markers (white) represents the best estimated position of the node on the head
- Scanned markers are compared to a template and automatically numbered
- The entire process can be completed in under 2 minutes

Game Programmer
- Digital Extremes Co-op
- Warframe: Co-op focused 3rd person action game
- AI Navigation: Replaced way-points with way-gates to improve group cohesion during movement
- AI Behaviour: Reworking the perception system to better prioritize agent perceptions based on player and event proximity, and other factors
- New Features: "Melee Assist" featuring an auto-target locking system and customizable camera controls to improve the experience for PS4 and PC players using gamepads.
- Misc: Gameplay improvements and the release of Steam achievements
Software Developer
- Uken Games Co-op
- NSERC Undergraduate Research Award
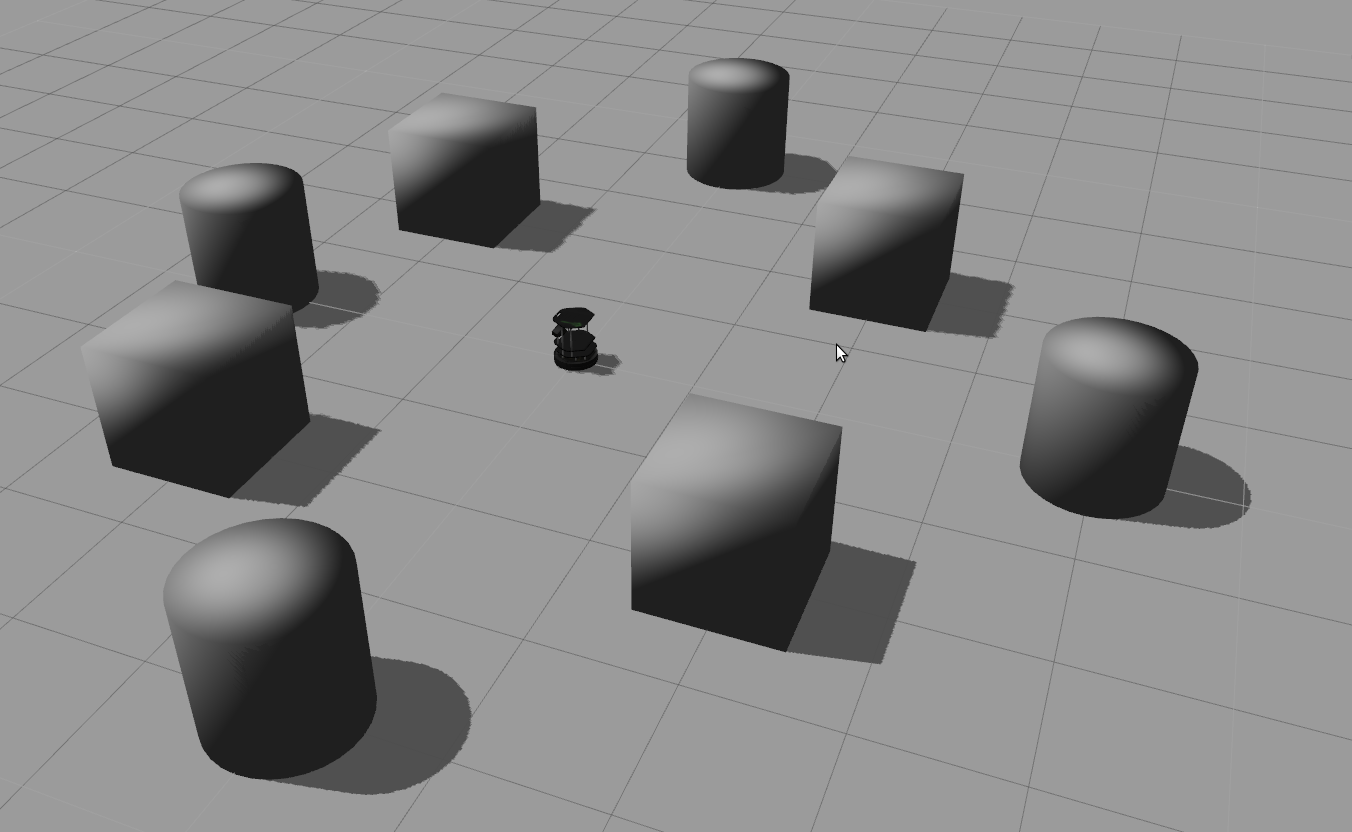
Autonomous Mobile Robotics
- More info